#include <Mob.hpp>
|
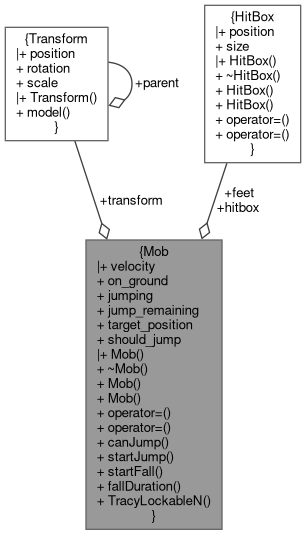
| Transform | transform = Transform({0.0, 0.0, 0.0}, {0.0, 0.0, 0.0}, {1.0, 1.0, 1.0}) |
| |
| HitBox | hitbox = HitBox({-0.4, 0, -0.4}, {0.8, 1.8, 0.8}) |
| |
| HitBox | feet = HitBox({-0.4, -0.01, -0.4}, {0.8, 0.1, 0.8}) |
| |
| glm::dvec3 | velocity = glm::dvec3(0.0) |
| |
| bool | on_ground = false |
| |
| bool | jumping = false |
| |
| int | jump_remaining = 1 |
| |
| glm::dvec3 | target_position = glm::dvec3(0.0) |
| |
| bool | should_jump = false |
| |
◆ Mob() [1/3]
◆ ~Mob()
◆ Mob() [2/3]
◆ Mob() [3/3]
◆ canJump()
| bool Mob::canJump |
( |
| ) |
const |
◆ fallDuration()
| double Mob::fallDuration |
( |
| ) |
|
◆ operator=() [1/2]
| Mob & Mob::operator= |
( |
Mob && |
other | ) |
|
|
delete |
◆ operator=() [2/2]
| Mob & Mob::operator= |
( |
Mob & |
other | ) |
|
|
delete |
◆ startFall()
◆ startJump()
◆ TracyLockableN()
| Mob::TracyLockableN |
( |
std::mutex |
, |
|
|
mutex |
, |
|
|
"Mob Mutex" |
|
|
) |
| |
◆ feet
| HitBox Mob::feet = HitBox({-0.4, -0.01, -0.4}, {0.8, 0.1, 0.8}) |
◆ hitbox
| HitBox Mob::hitbox = HitBox({-0.4, 0, -0.4}, {0.8, 1.8, 0.8}) |
◆ jump_remaining
| int Mob::jump_remaining = 1 |
◆ jumping
| bool Mob::jumping = false |
◆ on_ground
| bool Mob::on_ground = false |
◆ should_jump
| bool Mob::should_jump = false |
◆ target_position
| glm::dvec3 Mob::target_position = glm::dvec3(0.0) |
◆ transform
◆ velocity
| glm::dvec3 Mob::velocity = glm::dvec3(0.0) |
The documentation for this class was generated from the following files: